2024
基于立体视觉导航和图像处理的田间路径识别系统
盲选
创业训练项目
工学
电气类
学生自主选题
一年期
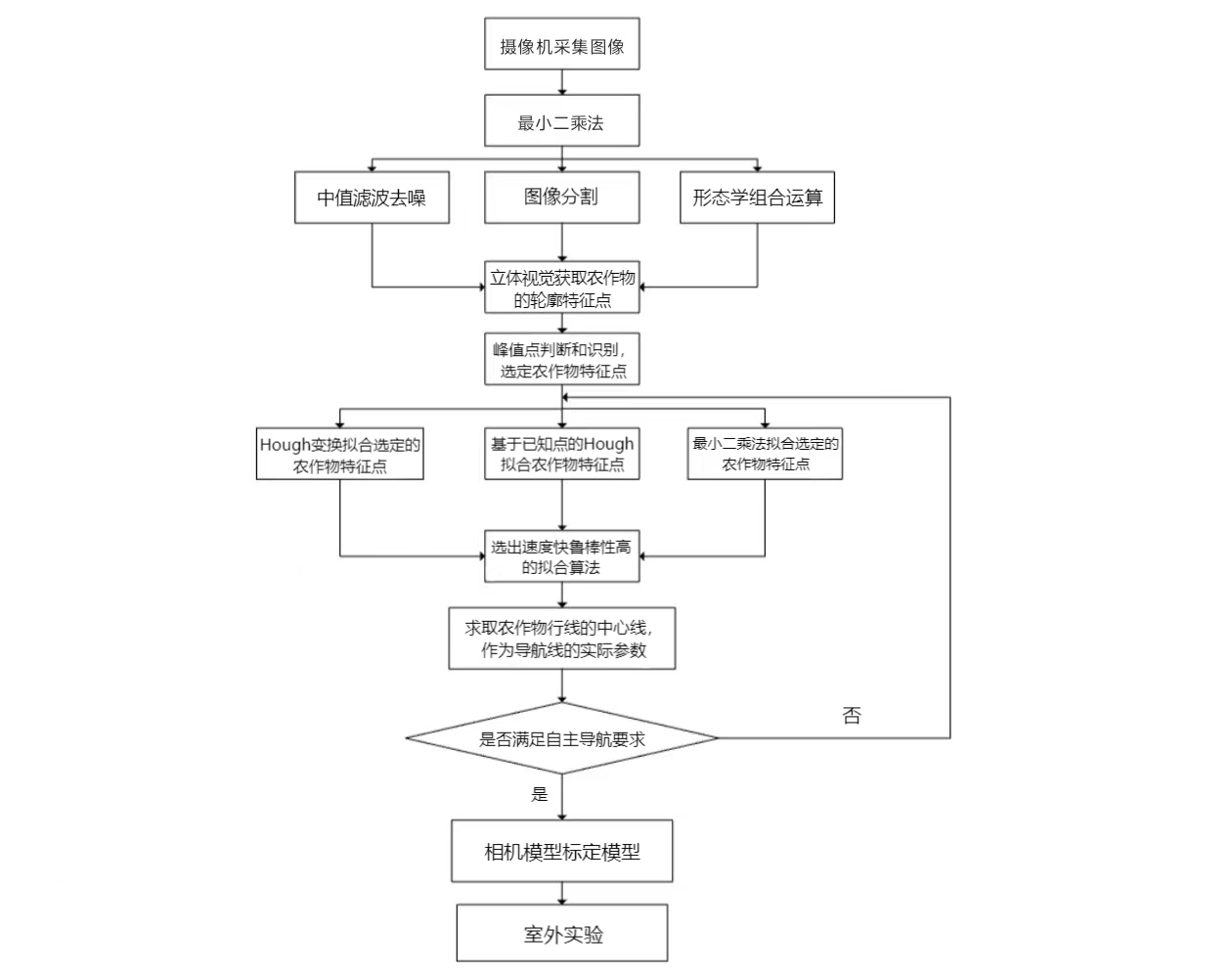
随着全球人口的快速增长,粮食安全问题日益凸显。作物的单产水平一方面由种业发展的基础决定,另一方面还要有配套的高效精准检测和绿色丰产技术。基于立体视觉导航和图像处理的田间路径识别系统用于智能识别田间的不同道路,精确指导农机在田间操作,从而减少对作物的伤害,并增强对农作物生长和食品安全的管理能力,通过这种方式,中国的农业生产力及自给能力预计将会得到显著的提升,为未来农业发展模式提供新的启示。
1.第十五届“蓝桥杯”大赛省赛
2.2023-2024华为ICT大赛
3.第十四届“挑战杯”负责人
4.2024互联网+大赛省赛
5.全国大学生金融科技创新大赛
6.2024中国国际大学生创新大赛
主持并完成大庆市指导性科技项目“基于多传感器融合的玉米变量穴施肥控制方法研究”一项,参与厅局级科研项目三项。
1.项目组成员组织协调上的支持:包括任务分配、人员变动、成果分配等
2.项目经费使用上的监管:劳务费发放、实验费用支出等;
3. 项目实施过程中技术上的指导:包括资料调研、实验设计、平台搭建、数据分析、论文撰写及投稿等。
蔡立秋,大庆芯启科技有限公司大定代表人、股东、高管,钻研于单片开发与应用。
1. 为项目团队的研究背景和研究设计提供方向性的指导,在难点和重点部分进行把关,帮助项目团队解决项目的难点;
2.为项目团队的实践创造条件,根据项目团队的实际需求,可以为项目团队协调实地考察方面的工作;
3.能够为项目团队的研究提供较为前沿的学术观点和指导;
4.依托学院实验室资源及课题组资源,为项目团队的实验提供设备上的支持。
国家级